|
Yue Chen | 陈越 I am currently a graduate student at Peking University with Agibot Lab advised by Professor Hao Dong. I am also fortunate to have mentorship from Ruihai Wu. I've also had great experiences working at MSRA and Seed ByteDance. My research interest is broadly in Robotics, 3D Computer Vision and large language models (LLMs), with particular interests in generalizable object manipulation. |

|
News
|
ResearchI'm open to collaborations on robotics related projects, feel free to contact me! Papers sorted by recency. |
|
DexGarmentLab: Dexterous Garment Manipulation Environment with Generalizable Policy
*, *, *, , , , , , , project page / paper / code / data
Under Review
TL;DR:
We introduce DexGarmentLab, a realistic sim environment for bimanual dexterous garment manipulation. Based on this environment, we propose a new benchmark, an efficient data collection pipeline, and a novel policy framework that uses category-level visual correspondences for few-shot garment manipulation.
|
|
TrustRAG: Enhancing Robustness and Trustworthiness in RAG
*, *, *, , , , , project page / paper / code
Under Review
TL;DR:
We introduce TrustRAG, a robust Retrieval-Augmented Generation (RAG) framework. It defends against corpus poisoning attacks by a two-stage mechanism: identifying potential attack patterns with K-means clustering and detecting malicious docs via self-assessment.
|
|
Point-Level Visual Affordance Guided Retrieval and Adaptation for Cluttered Garments Manipulation
*, *, *, , , project page / paper / code
CVPR 2025
Conference on Computer Vision and Pattern Recognition
TL;DR:
We study the novel task of cluttered garments manipulation using dense visual affordance, with generalization towards diverse states, and propose a novel adaptation module to reorganize cluttered garments into configurations conducive to manipulation.
|
|
ET-SEED: Efficient Trajectory-Level SE(3) Equivariant Diffusion Policy
*, *, *, , , , project page / paper / code / video
ICLR 2025
International Conference on Learning Representations
TL;DR:
We theoretically extend equivariant Markov kernels and simplify the condition of equivariant diffusion process, thereby significantly improving training efficiency for trajectory-level SE(3) equivariant diffusion policy in an end-to-end manner.
|
|
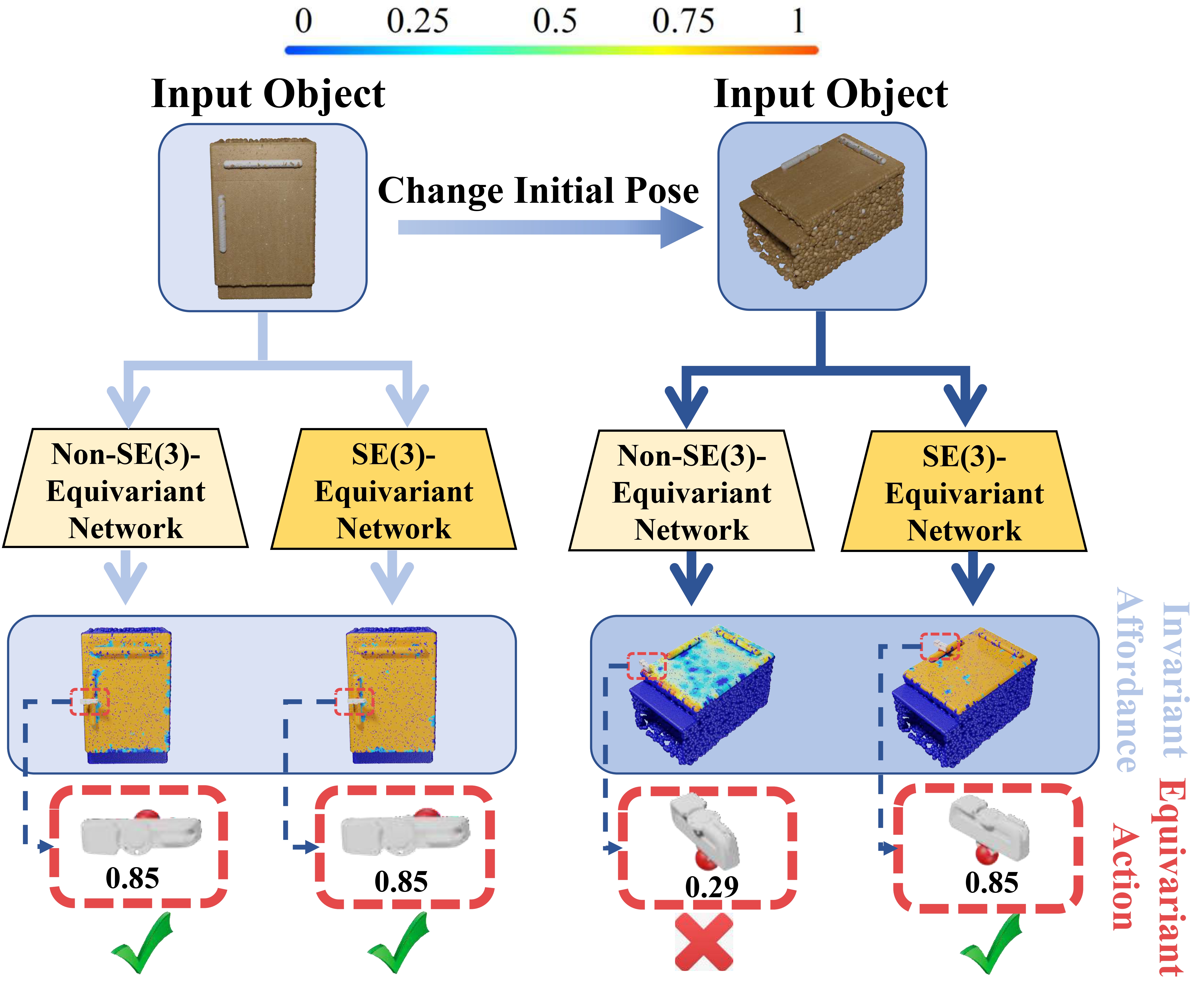
EqvAfford: SE(3) Equivariance for Point-Level Affordance Learning
*, *, *, paper
CVPR 2024 Workshop EquiVision
Conference on Computer Vision and Pattern Recognition
TL;DR:
We propose EqvAfford framework, with novel designs to guarantee the SE(3) equivariance in point-level affordance learning for downstream robotic manipulation.
|
Honors and Awards
|
|
Thank you for visiting! Feel free to contact me if you have any questions.
|